デブリ取り出し工法の変遷

ここでは、TMI-2においてどのように燃料・デブリ取り出し方法が定められたのかを、1983年~1986年の年次レポートの記述に基づいて整理した[1-4]。圧力容器内部調査で得られた知見、燃料取り出しの最初の重要工程であった、圧力容器ヘッドと上部プレナム構造物の撤去で得られた知見、および、これらの調査や作業に向けたプラント側の環境整備について整理することで、燃料・デブリ取り出し工法が定められた経緯を理解することができる。上部ルースデブリの取り出し後には、ボーリング調査や下部プレナム調査で得られた知見、上部ルースデブリ取り出しで得られた経験などに基づき、デブリ取り出し工法が改良されているが、それについては以下の別項目でまとめる。
参考:下部プレナム調査
図1に、当初基本プランとして検討された、ヘッドとプレナム構造物の取り外し方法を示す[1]。事故直後には、炉心損傷は比較的軽微で、燃料集合体の破損は炉心中央上部にとどまり、炉心中間から周辺部には燃料集合体がほぼ無傷で維持されているという推定が主流であった[5]。また、圧力容器の内部調査が行われていなかったため、それ以上の情報を得ることができなかった。そこで、既設の燃料交換システムを用いて一部破損していると想定された燃料集合体を取り出す方式が検討された。この方式では、最初の工程として、圧力容器を大気中で開放し、圧力容器ヘッドをクレーンで吊り上げて専用の貯蔵スタンドに移動する。大気中で移送することから、Dry-Liftと呼ばれた。次に、通常の燃料交換と同様に、燃料移送Canalを水没させてから、プレナム構造物を吊り上げてCanalの端にある専用の貯蔵リング上に移動する。その後、冷却水中で、燃料集合体を一体ずつクレーンで吊り上げて回収する。吊り上げられた燃料集合体は、燃料取り扱い建屋に近い側にあるCanal最深部に移送され、そこを経由して使用済み燃料プールに移送される。吊り上げ・移送作業は、原子炉建屋上部階に設置されているポーラークレーンにより行われる。作業員は、D-リングと呼ばれる高台の上から、遠隔でクレーンを操作する(#D-リング内には蒸気発生器や加圧器などの一次系が装荷されている)。事故炉では、ヘッドやプレナム構造物が汚染していると考えられるため、Dirty-Lift工法と呼ばれた[1]。TMI-2炉では、ヘッドとプレナム構造物について、大気解放条件でのDirty-Liftが可能かどうかを判断するため、ヘッド内面とプレナム構造物の汚染や損傷状態の確認が優先されることとなった。また、既設の燃料交換システムが利用できるかどうかについて、燃料集合体の上部の状態の調査が優先されることとなった(Quick Look調査[8])。


図2に、ヘッドとその上部にあった支持構造物の模式図を示す[6]。ヘッド撤去では、ヘッド本体と同時に、その上部の支持構造物(Survice Structure)と作業プラットフォームを、一体物として撤去する方式が基本案として検討された。Survice Structure内には、制御棒駆動機構(Control Rod Drive System: CRDM)が収められており、リードスクリューによって制御棒スパイダー、可燃性毒物スパイダー、APSRなどと接続されていた。事故発生時には、制御棒スパイダーや可燃性毒物スパイダーは、100%炉心部に挿入されていた。一方で、APSRは25%引き抜かれた位置にあった。上部構造物をヘッドと一体物として撤去するには、リードスクリューとスパイダーの接続を外し、リードスクリューを完全に引き抜くか、あるいは、Survice Structure内で中間位置まで引き上げて固定する必要があった。2つの工法の得失が検討された結果、完全にリードスクリューを引き抜くとむしろ工程が長期化し、作業員の被ばく量が増加すると判定された。そこで、リードスクリュー3本の試験的な引き上げ操作が行われ、Survice Structure周辺の線量変化、作業員の被ばく量予測が行われた。
一方、プレナム構造物については、事故による高線量が予想されたため、通常工法と異なり、先に燃料交換Canalに注水して水中で移動する方式が基本案として検討された(図1)。図3にプレナム構造物の模式図を示す[7]。プレナム構造物はシリンダー状の外形をしており(約4.2m径、約3.8m高さ)、その内部では、SS製の制御棒案内管(CRGA: Control Rod Guide Assembly)などの軸方向の構造物が、下部ではボルトナット方式で上部格子に接合され、上部ではプレナムカバーに溶接されている構造となっていた。その役割は、燃料集合体の上部を上部格子で固定し、制御棒挿入のガイドを提供することであった。燃料交換の際には、プレナム構造物をいったん撤去する必要があるため、圧力容器側の炉心サポート遮蔽や燃料集合体との間では、狭い隙間でのオス/メス構造(key/keyway)で据え付けられていた。しかし、事故時の高温でプレナム構造物に歪みや腐食が発生していた場合、周辺構造物との隙間が閉塞して固着あるいは融着している可能性が考えられた。さらに、Quick Look調査で、炉心上部とプレナム構造物底部の損傷が確認された。そこで、プレナム構造物の吊り上げは段階を分け、内部調査と付着デブリの除去を進めながら実施されることとなった[2]。調査の結果、機械的強度が十分に維持され、線量が遠隔操作でのDirty-Lift工法で許容できる範囲であった場合には、大気中で撤去されることとなった。許容できない場合には、燃料移送Canalに注水し、水中で撤去されることとなった。
参考:Quick Look調査
参考:圧力容器ヘッド取り外し
破損燃料の取り出しについては、当初は、通常の燃料交換方式と同様に、燃料交換Canalをすべて水没させ(図1)、D-リング上からの遠隔操作で取り出し・移送を行うことが基本案として検討された。Quick Look調査で、燃料集合体の上部は広い範囲で損傷して崩落し、炉心上部には空洞が形成され、その下に粒子状や粉末状のデブリからなるデブリベッドが堆積していることが明らかになった(上部ルースデブリ)[8]。そこで、粒子・粉末状のデブリを回収するための真空吸引システムと、長尺ツールで機械的につまみあげて回収するPick-and-Place方式が開発された[2]。また、ヘッドとプレナム構造物を撤去した後に、Canal全体を水没させて遠隔ロボット方式で、主に真空吸引方式で取り出す工法と、Canalは大気開放状態で維持し、圧力容器上に作業プラットフォームを設置して、長尺ツールによる手作業で取り出す工法が比較検討された。1984年5月に、後者の工法(作業員によるマニュアル操作)が選定されることとなった[3]。その理由として、装置や設備の信頼性・メンテナンス性、汚染水処理量の抑制、汚染範囲の抑制、圧力容器ヘッド周辺がD-リング上より空間線量線量が低く(#ドーム天井からのシャインの影響が小さいため)、作業員の被ばくが抑制されること、などがあげられた[9]。この決定では、作業員の被ばくをできるだけ抑制すること(ALARA)、作業期間をできるだけ短縮すること、が最も重視された。
1985年10月から、Pick-and-Place方式と真空吸引システムとを併用して、燃料・デブリ取り出しが開始された。取り出し開始初期には、上部ルースデブリと周辺の燃料集合体を対象に、3段階の取り出し手順が提案された[3]。
- 上部ルースデブリの上に堆積していた端栓や燃料集合体上部などをつまみあげて回収、あるいは、炉心周辺部にいったん移動
- 真空吸引システムを用いて、ルースデブリを吸引回収、一方、塊上デブリは摘まみ上げて回収
- ルースデブリ回収後に、炉心周辺の燃料集合体や、最初に移動しておいた塊上デブリを切断して回収
デブリ取り出し開始後2か月たたないうちに、長尺ツールの油圧媒体を養分として圧力容器内の冷却水中で微生物が繁殖し、冷却水の透明度が悪化した。また、バックフラッシュシステムを準備していたが、真空吸引システムではつまりが多く発生した。そこで、ブラインド作業で主にPick-and-Place方式によるデブリ回収が進められ、1986年末には、炉心デブリの約20%が回収された[4]。
デブリ取り出し作業の進捗に並行して、炉内のデブリ分布の推定精緻化が進められた。その結果、約1m弱の深さで堆積していた上部ルースデブリの下には、溶融凝固デブリ層や切り株燃料集合体が存在すると推定された。他方、下部プレナム周辺部のビデオ調査により、下部ヘッド上にデブリが移行し堆積していることが確認された[4]。そこで、炉心下部から下部プレナムにかけて、ボーリング調査を行うことが計画され、1985年7月に実施された[4]。次に、ボーリング装置の先端ピットを硬いブロック状のツールに交換して、炉心部の溶融凝固デブリ層の破砕作業が行われた。破砕されたデブリは、一部は、下部プレナムに崩落し、一部はPick-and-Place方式で回収された。この段階以降では、真空吸引方式に変わり、Airliftシステムが導入された。
参考:デブリ取り出しツール
参考:下部プレナム調査
圧力容器ヘッド取り外し
1983年の進捗[1]
- Quick Look調査、Underhead Characterizationなどにより、圧力容器ヘッドはDirty-Lift工法で、大気中で取り外せると判断された。
- ヘッド取り外し直後に、圧力容器上部に改良型でリークタイトなIIF(Internal Indexing Fixture)を設置して、水位をかさ上げし、高線量と予想される上部プレナム構造物を水没させて遮蔽する方法が採用されることとなった。
- 当初懸念された、ヘッド内側やプレナム構造物の付着デブリの自然発火性については、実デブリを用いた自然発火性確認試験が行われ[10]、自然発火の可能性は極めて低いと結論された。
- ヘッド取り外し・移動の物理的な障害となる制御棒スパイダーのリードスクリューについては、完全に撤去するのではなく、スパイダーとの接続を外してヘッド上の支持構造物内の中間保持位置で固定する工法が採用された(#中間位置で保持する方が、全引き抜き撤去に比べ、作業時間、被ばく線量、作業コストが小さくて済むと評価された)。
- ヘッド貯蔵スタンド周辺に水遮蔽体が設置されたが、リークが発生したため、砂遮蔽体に交換されることとなった。
- ヘッド周辺については、既設の遮蔽体やファンなどの不用品が撤去され、支持構造物とCanal浅瀬部分等が除染された。これにより、作業環境の線量が低減した。Canal浅瀬部とヘッド内部のシールとして、CSP(Canal Seal Plate)が取り付けられた。
- ヘッド吊り上げツールの検査と、ヘッドスタッド(Stud)のクリーニングと緩め作業が行われた。
1984年の進捗[2]
- CSPへのシーラント注入作業が行われ、Canal浅瀬部と圧力容器とのリークタイト状態が完成した。
- Studを緩める作業で、錆による固着が確認された。潤滑剤を注入、打撃処理、液体窒素による冷却処理などを行うことで、全てのStuds撤去に成功した。
- Stud撤去後の圧力容器フランジに、IIF据え付け用のガイドスタッド2本を取り付けた。
- 支持構造物の側面に鉛遮蔽体を取り付けた。
- ヘッド貯蔵スタンド周りの遮蔽体が、砂入りのポータブルグラスファイバータンクに交換された。
- ポーラークレーンを載せて移動する燃料移送ブリッジ(AFHB)を移設し、動作確認が行われた。
- 1984年2月に、ポーラークレーン負荷試験に成功した。
- IIFの改造と各種モックアップ試験が実施された。
- 1984年7月に、ヘッド取り外しに成功し、その後直ちにIIFの据え付けが完了した。
- IIF内に設置した浸水型ポンプにより、冷却水の連続処理系が稼働開始した。
参考:Quick Look調査
参考:圧力容器ヘッド取り外し
上部プレナム構造物の取り外し
1983年の進捗[1]
プレナム構造物の撤去工程の検討は、5個のワークに分類され実施された。
- プレナム撤去手法とツールの開発
- プレナム撤去作業の実施
- 臨界安全と作業安全の評価
- 燃料デブリ取り出し・移送方法の改良
- 使用済み燃料プールの再稼働
図1(上述)に、1983年時点でのヘッドとプレナム取り外し工法の概念図を示す[1]。当初計画では、ヘッドを大気解放条件でのDirty-Lift工法で取り外した後、建屋上部の燃料移送Canal全域を水没させ、水中でプレナム構造物を取り外し、Canal端の貯蔵スタンド上にソフトバリアで包んで保管するという工法が主に検討されていた。これは、事故炉では上部プレナムが汚染され、高線量になっていると想定されたためであった。圧力容器内部の高レベルの汚染水と、燃料移送Canalへの注水をできるだけ混合させないために、プレナム構造物のリフトアップ後ただちに、圧力容器上部にリークタイトのカバーを設置する方式が検討された。カバー設置後に、圧力容器内の冷却水と燃料移送Canalの冷却水は別系統で処理するという構想であった[1]。さらに、吊り上げた上部プレナム構造物はソフトバリアで包み、冷却水をできるだけ汚染させないようにすることが検討されていた。
プレナム撤去手法とツールの開発について
- プレナム構造物を一体構造物として撤去することが基本案とされた。具体的な工法として、3段階で、調査を進めながら撤去する方針が定められた。
- 第1段階:プレナム構造物を数cm~10数cmジャッキアップして圧力容器から分離(初期リフト)、損傷状態の調査とぶら下がりデブリや上部端栓を除去
- 第2段階:プレナム構造物をポーラークレーンで吊り上げ、Canal端に移動(水中、最終リフト)
- 第3段階:プレナム構造物をソフトバリアでくるんで、貯蔵Canal端にある貯蔵スタンド上に設置(図1参照)[11]
- この工法に合わせて、プレナム内部の調査ツール、ジャッキアップツール、プレナム移送と貯蔵ツール、クリーニングツールの設計が進められた[11]。
- プレナム内部の調査ツールは、ジャッキアップの障害になる可能性のある個所(Key/Keyway、円環状のプレートの上、等)が観察できるように設計された。デブリや上部端栓の付着・残留状態も観察できるように設計された[11]。
- ジャッキアップツールの設計要件が整理され、基本設計が終了した(4基の60トン油圧ジャッキ)[7,11]。
- プレナム移送・貯蔵ツールとしては、吊り上げ具、プレナム貯蔵リング、TCB(Transfer Containment Barrier)などが設計された[11]。
- TCBは、水中でのプレナム移動時に放射性物質を閉じ込めるためのコンテナとして設計された(#Dirty-Lift工法に変更されたため、実際には使用されなかった)[11]。
- デブリ除去のためのクリーニングツールとしては、上部格子からぶら下がっている燃料集合体上部を、プレナム撤去前に落とすためのスライドハンマーと高圧水フラッシング装置が設計された[11,12]。(#Quick Look前は、燃料集合体が多く残留し、上部でプレナムや上部格子と融着している可能性が考えられた。そこで、上部格子の溶接部を剪断するツールと油圧式の燃料デブリ吊り上げ設備が検討されていた。しかし、Quick Look調査により、ぶら下がりデブリの物量が、当初想定より少なかったため、スライドハンマーでたたき落とす方式に変更された。プレナムをジャッキアップした後には、高圧水で落とす作業も行われた)[1,7]。
- プレナム撤去作業のモックアップ試験の要件が整理され、モックアップ装置の準備が開始された[7]。
プレナム撤去作業の実施について
- EG&G社が、プレナム調査とプレナム撤去作業に参加することが合意された[1]。
臨界安全と作業安全の評価について
- プレナム撤去作業における仮想事象として、プレナム部に付着した燃料集合体上部が炉心部に崩落する事象について解析され、冷却水中のホウ素濃度を3500ppm以上に維持すれば、臨界までの十分なマージンが維持されると評価された[1]。
燃料デブリの取り出し・移送方法の改良について
- 既設の燃料移送メカニズムについて、チェーンドライブで駆動する水中モーターは信頼性が低いので、単純なウィンチケーブルで駆動するシステムに交換するように技術レビューが行われた[1]。
使用済み燃料プールの再稼働について
- 1983年内に、DOE予算により、使用済み燃料プールの冷却水循環システムが整備され、プールが再稼働された[1]。
1984年の進捗[2]
1984年5月の最終技術レビューにより、燃料移送Canalをすべて水没させてからプレナム構造物と燃料デブリを撤去・回収するという当初計画から、大気解放条件での上部プレナム構造物のDirty-Lift、および、圧力容器上部のプラットフォームからのマニュアル作業での燃料デブリ取り出しへの工法変更が行われた[9]。この決定に合わせて、プレナム構造物の撤去(最終リフト)を1985年5月に実施することも決定された。その準備段階として、大気中でプレナム撤去できるかどうかを確認するため、1984年12月に2段階で約18cmジャッキアップが行われた(初期リフト)[2]。初期リフトにより、圧力容器からプレナム構造物を機械的に分離することに成功した。さらに、付着デブリや上部端栓をスライドハンマーや高圧水で除去する作業が進められた。これは、付着デブリ量を減らして、核物質の持ち出しを減らすこと、および、プレナム底部を平らにし、貯蔵スタンドに水平に着座できるようにすること、の2つの目的で実施された[2]。
プレナム撤去の準備作業について[11,12]
- プレナム構造物を段階的に撤去する方針が示された。
- プレナム構造物内部の画像調査と付着デブリの除去
- 油圧ジャッキによるプレナム構造物の初期リフト
- 付着デブリをさらに除去
- IIF上の作業プラットフォームの撤去
- プレナム構造物の最終リフト、Canal最深部への移動
- IIF上に一時カバー取り付け(#水中での撤去の場合にのみ実施を計画。工法変更により、実際には採用されなかった。)
- プレナム構造物にバリア(TCB)、コンテナ取り付け(#水中での撤去の場合にのみ実施を計画、工法変更により、実際には採用されなかった。)
- プレナム構造物の状態(損傷、腐食)、プレナム構造物と周囲の構造物の干渉状態(固着、融着)、付着デブリの状態などについて画像調査が行われ、一体物としての初期リフトが可能かどうか検討された[2]。重要なチェックポイントは、プレナム構造物の取り付け溝(key/keyway)、ジャッキを載せる炉心サポート遮蔽フランジの表面、ベント弁やLOCA bosseなどとの干渉、上部格子とのクリアランス、などであった。
- 画像調査の結果、プレナム構造物には南北方向に歪み(東西方向に逆歪み)があり、局所的に損傷が見られた。また、Quick Look調査やQuick Scan調査で予想されたより多いデブリや上部端栓がぶら下がっていることがわかった。しかし、初期リフトでのジャッキアップは可能と判断された。
- 内部調査と並行して、新たに設計されたスライドハンマーを用いてぶら下がりデブリや端栓の除去が行われた。この際、APSR挿入試験[13]で炉心部に挿入され残留していたAPSRも除去された。
- プレナムジャッキアップツールと付着デブリを撤去するツールの設計製作が行われた。
- プレナム移動作業を遠隔監視するシステムの設置が行われた。Canal浅瀬部に設置されたカメラで、移動中のプレナム構造物の底部を下から観察し、その損傷状態が確認できるように準備された。
- 並行してジャッキや吊り上げ具の機能確認試験、モックアップ試験、作業員のトレーニングが行われた。
- プレナム構造物を圧力容器上で吊り上げた条件での重量物落下の解析が行われた。
- 作業員の環境改善のため、建屋の換気系、チラーが整備された。
プレナム初期リフトについて[7]
- 1984年12月6日に、第一段階として約6cmジャッキアップしていったん保持された。この段階で付着デブリが一部崩落した。さらに高圧水で洗浄された。
- 当初案では、さらに数段階に分けて約20cmジャッキアップする計画であったが、この段階で計画変更され、第二段階で一気に約18cmまでジャッキアップされることとなった。
- 12月11日に、約18cmジャッキアップされ、最終リフトが計画された1985年5月まで、この位置で保持することとされた。第二段階のジャッキアップの際に、さらに一部のぶら下がりデブリが自重で崩落した。残留デブリは、高圧水とスライドハンマーでさらに除去された。
- 初期リフト中の建屋内の線量変化はほとんど観測されなかった。

プレナム撤去工法の変更について[2]
- 燃料デブリの取り出し工法が変更され、これにあわせて上部プレナム構造物の撤去工法も変更された[9]。図4に示すように、Canal最深部のみに注水し、プレナム構造物の最終リフトと移送はDirty-Lift工法で行うことが決定された[2,12]。撤去したプレナム構造物は、Canal最深部に水没させることとなった。
- 工法の変更により、作業員は作業プラットフォーム上で最終リフトに向けた準備作業を行うことが可能になった(#Canalを全部水没させる計画では、D-リング上から遠隔で作業する必要があった)。
- Canal最深部のみに注水するため、最深部と浅瀬部の間に金属製のダムを取り付けることが決定された(#Canal全体を注水しないことで、冷却水の処理量が抑制された)。
- プレナムは構造物は強化プラスチック製のソフトバリアで囲んでCanal最深部に貯蔵することで、汚染の広がりを最小化することとなった。
- 圧力容器の上部は、IIF周辺の遮蔽体、作業プラットフォーム床面の鉛遮蔽、および、IIF内の1.5mの水位で遮蔽されることとなった。
- 工法の変更に対応して、ポーラークレーン、Tripod、Pendantなどのリフトアップ関連設備の機能確認が行われた。Pendantは、従来より長いもの(SS製)を新たに製作することになった。そのうち2個には、レベリング機能が付加された。
- プレナム構造物を覆ったバリア内の冷却水と圧力容器内の冷却水は、Canal最深部と使用済み燃料プールの冷却水とは別系統で処理することとされた。
- プレナム構造物撤去後のIIF上部に一時的にソフトカバーを取り付けるかどうか検討されることとなった。
1985年の進捗[3]
- 1985年5月まで、プレナム構造物はジャッキアップ位置に保持された。
- 1985年初頭までに決定されたプレナム構造物撤去方法の変更と、燃料デブリ取り出し工法の選定に基づき、Canal側の準備作業が進められた(#ダムの設置、Canal最深部の水位上昇)。
- 最終リフトの模擬構造物が製作され、吊り上げツール負荷試験と機能確認が行われた。プレナム構造物内部のビデオ観察とデブリ除去が継続された。
- 一方、プレナムリフトで形成された円環状の隙間を利用して、圧力容器下部プレナムまで小型ビデオカメラが挿入され、初めての下部プレナム調査が行われた。
- 1985年5月15日に、3時間の作業時間で、プレナム構造物の最終リフトとCanal最深部への貯蔵が行われた。プレナム移送中の建屋内の線量増加は予想値以下であった。移送作業はすべて遠隔で実施され、作業員はD-リング上の遮蔽エリアで作業を監視した。プレナム撤去により、炉心内部が初めて目視観察された。
燃料・デブリ取り出し

1983年の進捗[1]
冷却水クリーンアップ系について
- 冷却水中の濁りと放射性物質をフロー系で除去するシステムについて概念設計が進捗した。濁りはフィルターで除去し、溶解している放射性物質はイオン交換で除去する。また、圧力容器内とプレナム構造物の貯蔵バリアの内側と、燃料移送Canalと燃料貯蔵プールは、別系統として処理することが決定された。フィルター候補材の機能確認試験が実施された。
燃料取り出しツールについて[14]
- 燃料取り出しツールについて予備設計が進められた。Quick Look調査の結果に基づき、塊状及び粒子状や粉末状のデブリを回収するシステムが検討された。塊状デブリについては、すくい取るためのバケツ形状のツール、破砕するためのチゼルのようなツール、収納缶に装荷するためのバスケットのようなツールが必要となるとされた。一方で、粒子状や粉末状のデブリについては、2段階の真空吸引システムが検討された。1段階めではペレットサイズくらいまでのデブリ回収を、2段階めでは数ミクロンサイズまでのデブリ回収をねらうこととなった。それぞれのサイズのデブリ粒子を冷却水から分離して収納缶に装荷するフィルターが必要とされた。この段階では、すでに一次系冷却水の浄化系の設計が進んでおり、粒子・粉末デブリの真空回収システムの参考になると指摘された。真空吸引システムで取り切れない微粒子や溶融性のFPは、一次系冷却水の水質浄化系で対応することとされた。図5に真空吸引システムの基本構成を示す[1]。粒子状デブリを遠心分離方式で分離するKnockout型収納缶と粉末デブリを回収するFilter型収納缶を組み合わせた方式が検討された。
- WH社が、デブリ取り出しツールの設計担当に選定され、2つの方式が提案された。第一案は、作業員が長尺ツールを使ってマニュアルで回収する方式(Pick-and-Plcae工法)と真空吸引システムを併用する方式であった。作業員が遠隔手作業で長尺ツールを操作する。第二案は、遠隔ロボットによる自動化運転システムを導入する方式であった。第二案では、圧力容器内で、自動運転される真空吸引装置をデブリシュレッダーの近くに置き、すべてのデブリをスラリー状にして原子炉建屋から排出し、建屋の外で収納缶に装荷することが構想された。図6に、自動運転方式でのデブリ回収の概念図を示す[1]。この方式では、原子炉建屋内での手作業がほとんど不要となる。作業の監視ツールや粒子状/粉末状デブリの分離ツールは基本概念とほぼ同様になる。自動化システムは、1983年末時点で予備設計が進捗し、ロボットシステムの機能確認試験の準備がされていた。#しかし、ロボット方式の信頼性が十分でないこと、メンテナンス性が悪いこと、冷却水の処理量が増えることなどの理由で不採用となった。
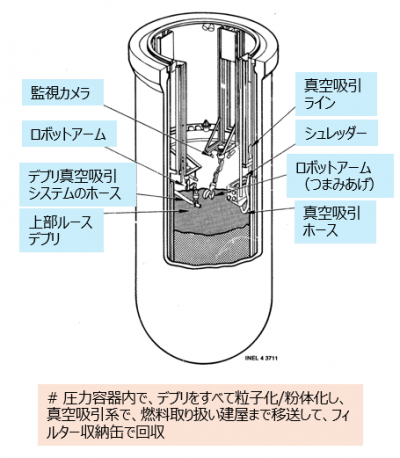
図6 WH社が提案した遠隔ロボット型のデブリ回収システムの概念図 [1]

燃料デブリ収納缶について
- これまでに設計が進んでいたFuelタイプの収納缶に加えて、KnockoutタイプとFilterタイプの収納缶の設計仕様が提示された[1]。これら3タイプの収納缶はそのまま輸送や貯蔵できるように設計される計画であった。また、Filterタイプ収納缶は、冷却水クリーンアップシステムとの共通設計となった。Fuelタイプ収納缶の基本設計が終了した。燃料集合体の全長がそのまま収納できるサイズが採用された。Quick Lookの結果を受けて、全長が短いタイプの収納缶も予備設計が行われた。#しかし、輸送や貯蔵時の利便性が優先され、短尺タイプは製造されなかった。
- できるだけ小さくてシンプルな形状の収納缶が、臨界管理の観点で望まれる(固有の安全性収納缶)が、内径の小さいタイプも製造されなかった。製造されたタイプの収納缶であれば、既存のDOE輸送キャスクが使えることも大きな利点となる。
収納缶貯蔵ラックについて
- 燃料貯蔵プールとCanalで使うラック発注のための仕様が決定された[1]。TMI-2とINELで同一仕様のラックが使用できるかどうか検討が進められた。
1984年の進捗[2]
燃料・デブリ取り出し方法について
- 遠隔ロボットでのデブリ取り出し工法について、技術的な精査が進められたが、この方式は採用されないこととなった。信頼性が重視され、長尺ツールを用いた作業員による手作業工法に決定された(1985年5月)。#遠隔ロボット工法は、クラムシェル型ツールで、デブリをつまみとり、シュレッダーにかけて粉砕・スラリー化して圧力容器外に移送する概念であった。デブリ取り出しツールはロボットアームで操作する。しかし、デブリ取り出し工法の決定を受けて、クラムシェル型ツール(ROSA:Remotely Operated Service Arm)とシュレッダーの開発計画は中断された。
- デブリ取り出しツールは、Fuel Removal Working TeamとFuel Removal Feasibility Review Groupで設計と技術レビューが行われた。
- プレナム構造物撤去後に、3段階からなるデブリ取り出し方針が検討された。
- Phase-I:デブリベッド表層の塊状デブリの回収、あるいは、炉心周辺部への移動(図7(左))。回収した塊状デブリは、Fuelタイプの収納缶に入れて取り出し、Canal最深部の収納缶ラックに移動
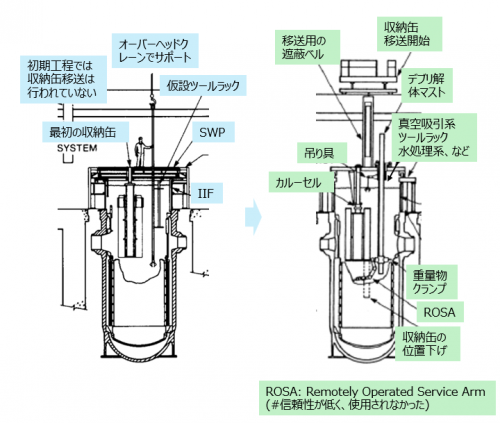
図7 デブリ取り出し第一段階(左)と第二段階(右)の概略 [参考文献2,3より作成] - Phase-III:バルクデブリの切断・解体と取り出し。圧力容器内で、最初に周辺によけておいた大きな塊状デブリや、炉心周辺に残留している燃料集合体を切断し、Fuelタイプの収納缶で回収。並行して、残留する粉末・粒子状デブリを真空吸引。さらに、炉心下部に存在している溶融凝固層、切り株燃料集合体、下部プレナム構造物などの切断・回収に着手

- デブリ取り出し作業では、圧力容器内の冷却水中でデブリを収納缶に回収し、収納缶を大気中で吊り上げ、遮蔽ベルで覆って、Canal最深部で再び水没させる。この際、圧力容器周辺のCanal浅瀬はドライ条件を維持する方針が定められた。
- デブリ取り出し作業中の、圧力容器内冷却水の浄化システムDWCS(Defueling Water Cleanup System)、収納缶の脱水装置、遮蔽ベルを含む収納缶移送システムが設計製作された。
- 燃料デブリ取り出しツールの設計が進捗した。油圧レーザー、油圧ソー、シャーリング、ジャックハンマー、油圧打撃チゼルなどが設計製作され、機能確認試験が行われた。燃料デブリ取り出しモックアップ試験装置の準備が進められた。機能確認試験の結果は、作業員の被ばく低減方策(ALARA)に反映された。
- デブリ取り出し関係の設備やツールは、いずれも、原子炉格納容器のハッチを通過できるように設計された。一方で、GPU社でハッチの撤去可能性が検討された。
- 建屋内作業環境での空間線量を下げるための努力が継続された(Canalや建屋の壁からの線量あるいは反射線量を減らす対策)。
- 粉末・粒子状デブリの真空吸引装置、IIF上の遮蔽付き回転作業台、カメラ監視系は製作発注が行われた。さらに、収納缶遮蔽カバー、カルーセル、ケーブルマネージメントシステム、長尺ツール、ツールラックの設計が終了する見込みである。ROSAと収納缶位置決めシステムについては予備設計が開始された(#ROSAは設計中断)。
- デブリ取り出しツールを実際に圧力容器内で使用する際の重要課題は、装置の位置取りとクリアランスであると指摘された。そこで、GPU社は、取り出しツールに関するDefueling Design Document(ツール設計、プラント側の準備)とDefueling Interface Control Document (組織間での設計情報のインターフェース)を公開し、対応策の検討を進めた。
収納缶について
- GPU社、B&W社、EG&G社、INELが共同で設計を進めた。設計条件として、INELで30年間貯蔵することとされた。
- Fuelタイプ、Knockoutタイプ、Filterタイプが設計された。外形は統一仕様とされ、SS製で、内部に臨界防止のためのB4Cと水素対策のための触媒が装荷できる構造となった。KnockoutタイプとFilterタイプは、DWCS系のフィルターシステムとしても共用されることとなった。#短尺タイプ、大口径タイプなどの検討も行われたが、移送収納、構外輸送の利便性、DWCSシステムとのマッチング、受け入れサイトとのインターフェースなどが重視され、外形は統一されることとなった。
- 収納缶の臨界安全、構造強度の検討が、特に構外輸送と長期貯蔵の条件で進められた。構外輸送時の安全性と臨界影響評価のため、収納缶落下試験が行われた。
- 収納缶取り扱い系の設計が開始された。収納缶をホールドするシステム、収納缶上部と下部の接続系、脱水システム、上部蓋のトルク締めツールなどが設計された。
1985年の進捗[3]
デブリ取り出し設備:ツールについて
- 主要な燃料デブリ取り出しツールが搬入され、作業プラットフォームに取り付けられた。
- 1985年初頭に、デブリ取り出しと収納缶への回収は、圧力容器内の水中で長尺ツールで行うことが決定された。
- 主要なデブリ取り出し設備・ツールは、遮蔽付き回転作業台、回転式カルーセル、真空吸引系、ビデオシステム、照明、ツールボックス、デブリバケツ、収納缶、長尺ツール(Pick-and-place工法で用いる、グリッパー、フック、たがね、シャーリング、タッパー、カメラ、光源、収納缶吊り下げ)であり、商用品を参照して設計改良が進められた[15]。
- ルースデブリベッド下に硬いクラスト層が存在することはほぼ確実となり(#デブリ探針調査、下部プレナムビデオ調査、油圧ツールでの揺動試験、サンプル分析、などの結果から)、一方で、溶融デブリが炉心下部構造物(LCSA: Lower Core Support Assembly)の隙間やバッフル板領域に侵入して凝固・堆積している可能性が懸念された。さらに、侵入した溶融デブリと構造物とが混合して硬い凝固層を形成している可能性が懸念された。この場合、より硬く正確な切断・破砕技術が必要となる。また、圧力容器内のより広い範囲でのデブリ取り出しに対応できるツールが必要となる。そこで、いくつかの追加ツールの検討が開始された。
- 追加ツールの候補概念は、クランピング/カッティングステーション、ツールの位置決めマスト、油圧式の打撃チゼル、ロボット操作のアーム、油圧カッター、強力なソー、切り株燃料集合体吊り上げツール、大型のデブリ粒子吸引システム(#ペレットサイズまで吸引可能)などであった。どのシステムをどこまで導入するか、導入した場合にいつまで使うかの検討が進められた。
- さらに、ボーリング調査装置を改良し、硬いデブリを砕けるように先端部が硬いビットに交換された。
周辺機器・設備について
- DWCSの取り付けが完了した。
- 作業プラットフォーム上に、サービスクレーンとジブクレーンが取り付けられた。#これにより、ポーラークレーンを常時使用することなしに、長尺ツールを支持できるようになった。
- 収納缶移送用に、ARB(Auxiliary Refueling Bridge)とトロリーが改造された。Canal最深部と使用済み燃料プール側に、収納缶ハンドリングシステムが設置された。
- 収納缶の脱水装置と貯蔵ラックが搬入・設置された。
- 3タイプの収納缶の設計が完了した。最大で280体必要と見込み、最初の45体が製作搬入された。
デブリ取り出し開始
- 徹底的なデブリ取り出しモックアップ試験と、技術成熟度レビュー委員会でのレビュー、NRCの安全審査を受けて、1985年10月30日にデブリ取り出しが開始された。
- 第一段階では、表面の塊状デブリを収納缶に回収した。1985年内に、収納缶2個が満載となり、2個に一部装荷された。一方で、デブリを砕く作業が進行し、真空吸引システムの準備が進められた。
- デブリ取り出しと並行して、ex-vessel debrisへのアプローチが開始された。まず、圧力容器外でのFPとデブリの堆積位置の調査が開始された。デブリ物量は少ないが、遮蔽がほとんどないので、作業員被ばく低減策が必要とされた。調査位置は、加圧器、蒸気発生器、その他圧力容器周辺の配管系であった。
- 遠隔ロボット(Rover-1)を使用した建屋地階の調査が進められた。
1986年の進捗[4]

デブリ取り出し作業と作業進展に伴う炉心部の状態について
表1に、デブリ取り出し開始以降(1085年10月~)の作業進展の概要を示す[4]。
- 1986年1月に最初の収納缶が使用済み燃料貯蔵プールに移送された。同時に、真空吸引システムの運用が開始された。デブリベッド上に塊状デブリが密集して移動や回収が困難なため、真空吸引できない粒子状デブリがデブリベッドの上部に残留した。そこで、ウォータージェットシステムが投入(高圧水ホース)された。
- 4月から真空吸引システムが本格運用された。デブリ回収速度は、約1.36kg/分であった。
- 一方で、デブリ取り出し開始約2か月で、微細物の大量発生により冷却水に濁りが発生した。2月には実質的に透明度ほぼゼロとなった。しかし、デブリ回収作業はブラインドで継続された。4月までにブラインド作業でつまめるデブリはほぼ全部回収され、小さい粒子や粉末ばかりになった。
- そこで、デブリ取り出しをいったん中断し、殺生物剤の投入などで水質浄化作業が行われた。5月には透明度が若干回復した。この段階で、上部ルースデブリ内の炉心周辺(残留している燃料集合体のさらに内側)に、馬蹄形リング構造が存在していることが明らかになった。馬蹄形リング構造は破砕されたデブリの凝集物のような構造であった(図8)。
- 6月にはボーリング調査の準備が進められ、7月にボーリング調査が行われた。ボーリング作業では、レーザーでの最初のドリル位置決めが難しかったが、それ以降は順調に進行した。
- ボーリング調査とボーリング孔のビデオ調査により、炉心下部のおよその成層化状態が明らかになった。
- また、炉心中央部の真下には溶融デブリの流出パスがなく、LCSAへのデブリ付着が少ないことが判明した。さらに、下部プレナム堆積デブリはルースで真空吸引システムが使えそうであると判断された。切り株燃料集合体の堆積位置から、事故時の水位が推定された。
- ボーリング調査後に、先端ピットが交換され、溶融凝固層の破砕作業が行われた。予想以上にデブリが固く、細かく砕けなかったため、この段階での破砕デブリを既存ツールで回収するのは困難と判断された。
- 9月にコアボーリングマシンが再度装荷された。さらに、塊状のデブリ(端栓など)が撤去された。崩落していた上部端栓はいくつか相互に固着して収納缶に入らなかったので、遮蔽付きのドラムにホウ酸水を満たして回収し、吊り上げを行った(#この時点では、その処理方法は未定であった)。
- 10月に、粉末凝縮ダイアモンドと炭化タングステンのピットを使用して、再度溶融凝固デブリの破砕作業が行われた。ボーリング孔を重ねながら採掘することで、デブリが破砕されることが確認された(スイスチーズ化)。破砕されたデブリはデブリ取り出しツールでFuelタイプの収納缶に回収された。作業は、11月中旬まで実施され、ボーリングは409本行われた。#しかし、この時点では炉心外周部に約40cm幅で存在していた馬蹄形リング構造部分はボーリングできず残留していた。ボーリング作業により、馬蹄形リング構造から塊状デブリが崩落した。
- デブリ破砕の後に、燃料デブリ取り出しツールが再装荷された。塊状デブリの取り出し状態を調べるために、Topographyとビデオサーベイが再開された(#この時点での透明度は10cm以下)。Topography調査では、落下したはずの重量物が一部確認できなかった。これらは、切り株燃料と下部ヘッドの間に落ちたと考えられた。
- 破砕された約50~100kgの塊状デブリがピックアップされ、Fuelタイプ収納缶内に特性のバスケットを取り付けて回収された。
- 11月にデブリ取り出しが再度中断され、水質改善が徹底的に実施された。12月初旬には、水質改善によりビデオデータやTopographyデータがより鮮明に取得できるようになった。この結果、10~11月に実施されたボーリング装置によるデブリ破砕は完全でなかったことがわかった。約30cmをこえるサイズの岩石状デブリがいくつか確認され、馬蹄形リング構造から崩落したと推定された。また、壊れたボーリングピットなどの部品も散乱していた。
- 壊れた部品は収納缶に回収された。大型の岩石状デブリをさらに砕く方法が必要となった。また、粉末・粒子状デブリのうち、炉心周辺部に近いものはデブリバケツが近づけず、この時点では回収困難であった。
- 1986年内にデブリの約20%が回収された。
LCSAと下部プレナムデブリについて
- 1985年9月に、LCSA(Lower Core Support Assembly)の解体方法の検討が開始された。
- 1986年4月に、それまでのデブリ取り出し経験と内部調査結果を反映して、LCSAと下部プレナムデブリの取り出し案が修正された。#おそらく、大きくて硬いデブリが下部プレナムとLCSA上に存在しており、LCSAの解体撤去が必要と考えられた。解体方法として、プラズマアーク、加熱棒、AWJ(Abrasive Water Jet)が候補となった。
- 候補概念の詳細設計と機能確認試験が進められ、LCSA解体の主要機器としてプラズマアークが採用されることとなった。AWJは、すでに炉心領域でのデブリ破砕につかわれていたが、LCSA解体ではバックアップツールとされた。
- さらに、LCSAのクリーニングシステムと、デブリ粒子の破砕システムが必要と考えられ、研磨砥石、フラッシング装置、真空吸引系などが準備された。
- 並行して下部ヘッドデブリの取り出し方法の検討が開始された。ボーリングマシンでLCSAに穴を開けた後に、真空吸引系とフラッシングツールを下部プレナムに挿入する案が提案され、1987年に詳細検討を行うこととなった。
ex-vessel debrisについて
- 圧力容器外デブリ(ex-vessel Debris)の回収については、1986年第三四半期に検討が開始された。
- 3つの加圧スプレーシステムが基本検討された。(i)PSLDS(Pressurized Spray Line Defueling System)、(ii)PDS(Pressurized Defueling System)、P/DS(Plenum Defueling System)
- PSLDPは、既設のDWCSを水源に利用して、加圧器やコールドレグの中をフラッシングする方式であり、1986年内にホースが敷設され、1987年にはフラッシングの準備が開始された。
- PDSは、ホース系を新設し、DWCSで処理した冷却水(Filterタイプ収納缶通過後)を利用する方式であった。
- P/DSは、LCSAの付着デブリ除去やFTC床のデブリ除去に利用される見込みで、真空吸引系と共用される方式だった。
参考:デブリ取り出しツール
| 時期 | できごと | 備考 |
|---|---|---|
| 1985.10 | 燃料・デブリ取り出し開始 | 初期フェーズでは、崩落していた上部端栓110個や、制御棒・可燃性毒物棒のスパイダー破損物、などが回収、あるいは炉心周辺部に移動された |
| 1985.12 | 最初のFuel収納缶回収 | 上部ルースデブリの回収が開始された |
| 1986.1 | 微生物による冷却水の濁りが課題に | 長尺ツールの油圧媒体が微量に水中にリークし、それを栄養分として細菌が大量に発生 [16]
以下の作業は、透明度の低い冷却水中で実施(ブラインド操作)[16] |
| 真空吸引システムの運用開始 | ||
| ビデオ調査:炉心東側の燃料集合体の倒壊状態 | ||
| 1986.2 | 実質的に透明度ほぼゼロ | |
| 1986.4 | ブラインド操作で回収できるデブリがほぼなくなった | |
| 殺生物剤投入 | ||
| ウォータージェットシステム投入 | 高圧水ホースで粒子/粉末デブリを巻き上げにより、デブリ回収速度:1.36kg/分 | |
| 1986.5 | 水質が若干改善 | |
| 回収可能なデブリを回収した後で、デブリ回収作業をいったん中断
コアボーリングの準備開始 |
||
| 1986.6 | ビデオ調査:ルースデブリ回収後のクラスト層の表面状態 | 馬蹄形リング構造を発見(図8) |
| 1986.7 | コアボーリング調査(10本) | ボーリング開始位置の位置決めが難しかった
LCSAと下部プレナムに堆積していたデブリのサンプリングも計画されたが、うまくいかなかった |
| ビデオ調査:ボーリング穴内部(成層化状態)、下部プレナムデブリ表面、LCSA | 溶融凝固層、上下クラスト層、切り株燃料集合体のおよその分布を把握
下部プレナムにはルースデブリが多く堆積 これらの情報から、溶融凝固デブリを破砕した後で、機械的に回収する方法と真空吸引法を併用することになった | |
| 1986.8 | ボーリング装置の先端ピットを交換し(2インチ径ロッド)、
炉心中央の溶融凝固層をボーリング破砕(48本) |
破砕作業は不十分 |
| 1986.9 | 水質改善 | |
| 最初に周辺にどけておいた上部端栓を遮蔽付きドラム缶に回収 | 崩落していた上部端栓の一部は固着し、収納缶に入らなかったため、別途回収された | |
| 1986.10 | ビデオ調査:上部空洞の側面と床面
周辺燃料集合体の残留状態、溶融凝固層の破砕・残留状態 |
この段階でのデブリ破砕の程度では、既存ツールでの回収は困難と判断
ボーリング破砕を追加することに |
| 1986.11 | ボーリング装置の先端ピットを再交換し(4.4インチ径、WC/粉末ダイヤモンド製)、
馬蹄形リング構造ぎりぎりまでボーリング破砕(409本)、スイスチーズ化 |
炉心中央から中間部にかけてデブリ破砕完了、この段階では馬蹄形リング構造は十分に破砕できず |
| デブリ取り出しを再度中断、水質改善を優先 | ||
| 1986.12 | ビデオ調査、Topography調査:破砕後のデブリ状態 | 大きな塊状デブリが残留(おそらく、ボーリング破砕時に馬蹄形リング構造から崩落)
ボーリングピットなどの破損品が散乱[4]、Fuelタイプ収納缶に回収 |
| デブリの20%を回収 | 下部プレナムの岩石状デブリと炉心周辺燃料集合体の回収方法が次の課題(1987年に詳細検討) |
燃料デブリ取り出し以降の内部調査


1985年の進捗[3]
- 炉心下部を調査するボーリング装置の設計製作が終了した。1986年内に、建屋内への搬入と組み立てを行い、ボーリング調査が実施されることとなった。
- ボーリング調査の目的は、炉心下部の成層化状態の観測であり、ボーリングサンプル回収とボーリング孔のビデオ調査が計画された。
- ボーリングマシンの模式図を示す(図9)[3]。回収されるボーリングサンプルの詳細分析は、1988年ころにINELで実施することとされた。一方で、1986年には、上部ルースデブリサンプルの詳細分析が計画された。
1986年の進捗[4]
- 追加で周辺燃料棒などのサンプリングが行われた。
- 1986年1月に、微生物繁殖問題が顕在化し、冷却水の水質が悪化した。
- 一方で、下部プレナムデブリのサンプリングと分析、下部プレナム周辺部での堆積状態のビデオ調査が進められた。これにより、残された情報不十分な領域は、溶融凝固デブリの下部プレナムへの移行パス、LCSAへのデブリ付着・堆積状態、下部プレナム堆積デブリの中央底部の状態(#燃料以外のデブリが溶融凝固している可能性)となった。
- γ線スキャン装置が開発された(#ボーリングサンプルの縦方向分析)。この装置は、INELに搬入され、燃料集合体上部サンプルの分析に使用された[17]。
- さらに、切り株燃料集合体の上部をつかむ装置、コアボーリングバレルを取り出す装置、これらのサンプルから分析対象個所を分取する装置が開発された。
- これらの分析補助装置の設計製作と機能確認試験が終了し、INELに搬入された。しかし、上部端栓サンプルの収納缶からの取り出し作業は難航した(#収納缶内にさかさまに入っており、微粒子デブリが収納缶の内管とサンプルの境目にくさびのように入ってしまったため)。
- ボーリング装置の準備が完了し、1986年7月に炉心部での10本のボーリング調査と、うち9本でのボーリングサンプル回収に成功した(図10)[4]。3か所では、LCSAの貫通にも成功したが、下部プレナムデブリの採集には失敗した。1本のボーリング調査では、原因不明だが、炉心部においてもサンプル採集に失敗した。
- 8月には、先端ピットを交換して、ボーリング装置がデブリ破砕ツールとして使用された。炉心中央部を48本、約5cm径のボーリングピットで破砕する作業が行われた。デブリ破砕状態は、Pick-and-Place工法でのデブリ回収に十分ではないと判断された。
- さらに11月に、馬蹄形構造の近くまで、409本、約11cm径のボーリングピットでの破砕作業が行われた。ここで、ボーリングマシンはいったん待機となった。
- 冷却水の水質改善と並行して、以下の燃料・デブリ取り出し作業のビデオ観測が継続された(表1)[4]。
1月:炉心東側の空洞床部分で、P4集合体の倒壊状態を調査
6月:ボーリングを予定した堆積物床面を調査(#ルースデブリ取り出し後の溶融凝固層の表面状態)
7月:ボーリング穴の内側、下部プレナム堆積物表面を調査(#デブリ成層化状態、下部プレナムの様子、LCSAの損傷状態)
10月:上部空洞の側面と床面、炉心周辺の倒壊していない燃料集合体の様子、ルースデブリの残留状態、を調査
12月: ボーリングマシンで砕いた後の様子を調査
デブリ取り出し開始以降の内部調査の結果
- 周辺燃料集合体の損傷は、元の空洞床面よりも下のレベルまで到達、特に溶融凝固層レベル付近で増加。
- 上部クラストの上に、馬蹄形リング状の凝集相(馬蹄形リング構造)が存在(図8)[4]。馬蹄形リング構造は、周辺残留燃料集合体よりやや内側に存在(#その上に、ルースデブリはあまり堆積していなかった)。
- 炉心下部の成層化状態を解明。デブリ堆積状態のマッピングを実施(図11)[4]。
- 溶融デブリの下部プレナムへの移行パスをほぼ同定(#炉心南東側の外周部)。
- 大きな塊デブリが崩落しているのを観測(馬蹄形リングからの崩落物と推定)、馬蹄形リングの切れめを観測。
- P5,R6あたりでコアフォーマプレートに反りを観測。

選定された燃料・デブリ取り出し方法
1984年後期から1985年初旬にかけて議論が進められ、1984年5月の最終レビューにより、燃料・デブリ取り出し方法が決定された[2,3]。この決定を受けて、1984年12月に、デブリ取り出し工法の基本設計が終了し、設備・ツールの詳細設計が進行した。詳細設計では、ALARAコンセプトに基づいて、作業員の被ばく線量抑制方法の検討、トラブル対応策の検討、などが行われる予定である。さらに、詳細設計の結果を反映して、以下のコンセプトが随時変更されると記述されている[19]。1985年5月にプレナム構造物の最終撤去が予定され、1985年7月にデブリ取り出し開始が予定された(#実際には、やや遅れて10月に開始)。
また、デブリ取り出しの進捗に合わせてさらに研究開発が必要であると指摘されている。二度と使われない技術であるが、設計製作によって得られる知見は普遍的に価値があり、TMI-2は燃料取り出し技術開発や事故進展解析技術の基礎力をレベルアップする場であるとされた。さらに、事故のモデリングに関する貴重な知見が得られつつあり、それに基づいて、事故時の安全性の超保守的な仮定を低減することで、将来的なコスト減にもつながる可能性があるとされた。
燃料・デブリ取り出し方法の基本コンセプト[18,19]
TMI-2での燃料・デブリ取り出しの基本的な考え方は、事故以降、関係者で以下のように共有されていた。
- 破損燃料の取り扱いは、できるだけ単純で、建屋に既設の設備やツールを利用して開始する。そこから、必要に応じて、少しずつ複雑で改良された方法を導入する。
- 冷却水の水位は、デブリ取り出しツールをカメラで監視しながら使用できるように、できるだけ低くする。
- 収納缶を遮蔽するために、破損燃料や炉心デブリの取り扱いは、圧力容器内で行う。高線量の冷却水は圧力容器内と一次系(RCS:Reactor Coolant System)に限定されるため、低線量の冷却水(貯蔵プール、Canal最深部)側にリークしないようにする。これにより、汚染水の処理量をできるだけ減らす。
- 取り出しツールや設備はできるだけ単純な構造、仕組みにする。燃料取り出しと移送方法について、将来的な改善の自由度があるように工夫する。
- 作業環境と外部への線量は許容範囲内でできるだけ合理的に抑制する(ALARA)。
技術レビューの結果、装置の信頼性の観点で、できるだけ作業員がデブリの近くで作業できるように、燃料移送Canalを水没させずにプレナム構造物を撤去した上で、IIFの上に作業プラットフォームを設置し、長尺ツールで燃料・デブリ取り出しを行う方法が採用された。装置の信頼性、メンテナンス性の観点で、WH社の提案した遠隔ロボット方式は不採用となった。
参考文献[19]によると、この決定がなされた要因の一つに、圧力容器周辺にあるCanal浅瀬部は、実は空間線量が低く、作業スペースとして利用しやすかったことがあったと指摘されている。デブリ取り出し前の空間線量は、D-リング上などでは約100mrem/h、建屋の地下階では数100rem/hであったのに対し、Canal浅瀬部は約20mrem/hであった。これは、Canal浅瀬は周囲をコンクリートで囲まれ遮蔽されていたためと推定された。
また、廃棄物物量をできるだけ減らすこと、上部空洞がデブリ取り出し作業空間として利用できること、手作業方式の方が将来的な自由度が大きいこともマニュアル工法選定の大きな理由とされた。
燃料・デブリ取り出し方法の概要
作業員が、できるだけ実際にデブリを取り扱う場所の近くで作業できるように、圧力容器上部周辺(Canal浅瀬部、圧力容器上部の燃料移送用の空間)はドライ条件を維持することとされた。緊急時には、Canal浅瀬にホウ酸水が注水できるように準備がなされた。改良IIFを設置して、圧力容器フランジレベルの上1.5mまで水没させ、その上に置かれる作業プラットフォーム(SWP: Shielded Working Platform)が水遮蔽されるように設計された。解析上は、この水位上昇された冷却水による遮蔽で十分であったが、SWP底面はさらに約2.5cm厚の鉛板で遮蔽された。また、デブリは、塊状、粒子状、粉末状であるため、真空吸引方式とPick-and-Place方式を併用すること、デブリを入れた収納缶を遮蔽キャスク内に吊り上げ、Canal最深部まで大気中で移送し、Canal最深部で水没させることとされた。Canal最深部から隣接する燃料取り扱い建屋の使用済み燃料プールへの移送は、既存の燃料移送システムを改良して行うことが定められた。
燃料・デブリの取り扱い方法として、作業員がマニュアルで長尺ツールを使うPick-and-Place方式と、ROSA(Remote-Operated Service Arm)を遠隔操作する方法が比較検討された。検討の結果、ROSAは不採用となった[16]。また、デブリ回収の様子はビデオ撮影すること、SWP周辺の線量(Canalや建屋の壁からの直接あるいは反射線量)をできるだけ低減すること、このため、Canal最深部に一時的に貯蔵する収納缶本数をできるだけ減らすこと、などが定められた。プレナム構造物はCanal最深部水中に、バリアをつけずに貯蔵されることとなった。
燃料・デブリ取り出し初期は、以下の3段階で行い、進捗状況によってフレキシブルに対応することとされた(図5,7)。
- Phase-I: デブリベッド表層の塊状デブリの回収、あるいは、炉心周辺部への移動。回収した塊状デブリは、Fuelタイプの収納缶に入れて取り出し、Canal最深部の収納缶ラックに移動。
- Phase-II: 粉末・粒子状デブリの真空吸引。真空吸引したデブリは、knockoutタイプとFilterタイプの収納缶で回収。並行して、比較的大きな粒子状デブリは機械的にバスケットやバケツで回収し、Fuelタイプの収納缶で取り出す。これらの作業のための、収納缶位置決めシステムや真空吸引システムを設置。
- Phase-III: バルクデブリの切断・解体と取り出し。圧力容器内で、最初に周辺によけておいた大きな塊状デブリや、炉心周辺に残留している燃料集合体を切断し、Fuelタイプの収納缶で回収。並行して、残留する粉末・粒子状デブリを真空吸引。さらに、炉心下部に存在している溶融凝固層、切り株燃料集合体、下部プレナム構造物などの切断・回収に着手。
燃料デブリ取り出しは、作業進捗を目に見える形で公開していく観点からも、できるだけ早期に着手することが重要であると指摘されている。また、圧力容器の内部状態がすべて明らかになっているわけではないので、取り出し作業を進めつつ、内部状態の理解を深化させ、取り出しツールや手法を改良していくのが合理的とされた。さらに、燃料・デブリ取り出し工程全体に対して最適化された手法・ツールを開発するのではなく、現状の知見に基づいて上部から取り出しを開始し、その仕様を越えた要求が出てきた場合には、それに逐次対応していくのが合理的とされた。 その際に、
- ALARA、臨界安全、放射性廃棄物の最小化が最優先されるべき
- デブリ取り出しのゴールが明確に共有されるべき(#TMI-2では、圧力容器内に残留しアクセス可能な炉心物質を燃料取り扱い建屋内の貯蔵プールに移送することがゴールとされた。)
- 燃料デブリの輸送形態は、遮蔽付き収納缶に限る(#遠隔ロボットでのスラリー移送はおこなわない)
- 燃料デブリ取り出しに使用するツールの数を減らすため、できるだけ多目的に使用できるツールを開発して用いる
- 炉心支持構造物(CSA: Core Support Assembly)に損傷を与える作業は禁止
- 圧力容器内の計測器ラインを取りはずすための準備を行う
とされた。
冷却水処理系
事故により、通常の冷却水系は使用不可となっていた。また、デブリ取り出し作業が始まると、冷却水中の溶融FP濃度、デブリや構造材のコロイドや微粒子量が増加すると考えられた。そこで、Canal最深部の冷却水を循環処理できるようにDWCS(Defueling Water Cleanup System)系を設置し、次に、プレナム構造物撤去後に、別系統のDWCSで圧力容器内冷却水の循環処理を並列で行うこととされた。イオン交換・ろ過後の冷却水は圧力容器内orCanal最深部にそれぞれ戻すこととなった。一部は、可溶性FP処理系に送られることとなった。このラインには、追加フィルター(通常のカートリッジタイプ)を設置し、フィルター型収納缶が破損しても、粒子状デブリがイオン交換系に行かないようにするように設計された。

SWP(Shielded Working Platform)
SWPは、IIFの上に、IIFとは別の支持構造物でとりつけられることとなった。図12に、SWPの構造を示す[19]。モジュラー型のデブリ取り出しツールを、プラグでとめて、支持できるように設計された。また、プラットフォーム全体の床面が鉛板で遮蔽され、作業員がSWPのどこでも作業できるように設計された。プラットフォームの駆動は、スプロケット(大きな歯車)をチェーンドライブモーターでまわす方式が検討された。SWPが回転することは、デブリ取り出し作業において非常に重要な設計仕様だが、逆に、ケーブル類の扱いを工夫する必要が発生した。そこで、ケーブル、配管類の本数をできるだけ減らすように設計された。さらに、これらを手動で取り外せる接続バルブを使うことになった。
SWPには、デブリ取り出し用の各種長尺ツール、カルーセル型の収納缶サポート、真空吸引システム、フィルター収納缶保持システム、ジブクレーン、ツールラックなどが取り付けられた。また、電気系、油圧計、空気圧系の接続とテレビカメラケーブルは、作業パネルを通じて、配線、配管された。これらは、固定プラットフォームと回転プラットフォームの間での配線の干渉を避けるため、回転プラットフォームの床下に集めて配線された。デブリを入れた収納缶を吊り上げる際に遮蔽する補助遮蔽プレートが配置された。
真空吸引システム
粒子状、粉末状デブリの回収用に、真空吸引システムが設計とされた(図5)[1]。吸引ホースの先端は、圧力容器内のどこにでもアクセスできるように設計された。さらに、炉心部でのデブリ取り出し後に、下部プレナムに堆積するであろう粒子状や粉末状デブリの処理にも使用できるように設計された。真空吸引システムもモジュラー形式になっており、SWPのプラグで支持される。 故障した時には、モジュールごとに取り外して交換できるように設計された。モーターだけの交換、様々な長さのホースだけの交換、も可能であった。Knockoutタイプの収納缶の後段からバックフラッシュを行うことで、つまり対策が可能なように設計された。Knockoutタイプ収納缶まわりは、クイックコネクションで接続され、ノズルも含めて、SWPから長尺ツールで取り外し可能であった。
しかし、実際に稼働させてみると、2つの課題が発生した。Knockoutタイプの収納缶が想定以上につまりやすい。粒子状デブリとして、ペレットサイズ以下を想定していたが、実際には複数のペレットが固着していたㇼ、破損した燃料棒被覆管が混在するなど、数mmを超えるサイズのデブリが存在していた。このため、取り出し工程の途中からKnockoutタイプ収納缶はあまり使用されなくなった。代わりに、ホースでデブリ粒子を巻き上げて、機械的にデブリバケツに回収する方法が用いられた[18]。さらに、取り出し後期にはエアリフトが設計製作された[19]。
デブリ取り出しツール

図13に、初期に検討されていたデブリ取り出しツールの模式図を示す[18]。ハンドリング部と先端は別々に交換可能であり、色々な作業に対応できるように設計された。また、Hoistを使ってオーバーヘッドクレーンで吊り降ろることで、作業員は長尺ツールの重量を支えることなしで作業できるように設計された。最初に提示されたデブリ取り出しツールの機能リストは、単一燃料棒/制御棒のシャーリング、固着部を分離するくさび、3点支持グリップ、4点支持グリップ、グラップ(つかんでゆする機能)、万力、ボルトカッター、ひっかけ、などであった。このリストは設計の進歩と、内部調査で得られた情報により、随時修正された。特に、初期の取り出しでは、軽いツールを使うことが重視された(#デブリベッド表面のいろいろな堆積物をつまんで収納缶に入れることを想定)。収納缶入口のクリアランスがぎりぎりだったが、崩落している上部端栓などを収納缶の底におとしこむツールも必要と考えられた。 各種ツールの機能確認試験が進められた(例:模擬破損燃料棒のシャーリング試験、劣化ウランペレットをZry燃料棒入れて切断試験)。多くのツールはホットラボで使用されていたものを改良して設計された。また、濁った水でもツール先端がある程度目視できるように、ライトとビデオシステムが検討された。
圧力容器から取り出す際には、長尺ツールはリンス、ワイプ、あるいはバッグされた。長尺ツールはCanal端の貯蔵ラックに格納された。予備ラックはポーラークレーンだけがアクセスできる建屋の端に配置された。

デブリ収納缶
図14に3タイプの収納缶の模式図を示す[18]。収納缶取り扱いの利便性から、3タイプの外寸を同じにすることが重視された(35cm径、380cm長)。デブリ取り出し作業の観点からは、大口径の収納缶や短尺の収納缶が提案されたが、採用されなかった。設計上の耐用年数は少なくとも30年で、ベント機能と脱水機能を有し、リークタイトであることとされた。
Fuelタイプ収納缶は、大きな塊デブリを入れるために上部蓋は着脱可能とされた。内側のシュラウドサイズは可変で内容積を変えられるように設計され、周辺に中性子吸収剤を挿入できるようにされた。上部蓋にはクイックコネクションをつけ、脱水やベント用のバルブが取り付けられた。Knockoutタイプ収納缶は、デブリの真空吸引系の前段に配置された(図5)[1]。収納缶内で、冷却水速度を低下させ、粒子状デブリを沈降させる方式であった。B4C粉末を装荷したロッドを内部に配置し、臨界対策が行われた。クイックコネクションは上部に設けられた。Filterタイプ収納缶は、SS粉の焼結フィルターを取り付け、許容流速6リットル/秒でフィルタリング可能な設計とされた。設計上は<0.2μmの粒子は排水側に移行する。中性子吸収剤が装荷され、クイックコネクションは上部に設けられた。3タイプ共に、圧力容器(リークタイト)構造で、内部に中性子吸収剤と水素の再結合触媒が配置された。
デブリ取り出し作業
Canal浅瀬はドライのまま維持し、Canal最深部は水没させ、両者の境界にはダムが設置された。これにより、Canal最深部は収納缶の取り扱いに十分な水位が維持された。 デブリ回収後に、SWPレベルまで収納缶をつりあげ、遮蔽体で囲いつつ、ブリッジからつりさげた遮蔽キャスク内に挿入する。移送トロリーで、遮蔽キャスクごと水平移動させ、ダムをこえてCanal最深部に移動させる。 Canal側の収納缶移動システムを使って、遮蔽キャスク内の収納缶をCanal水中に吊り降ろす。 Canal最深部には、貯蔵プールに移送するまでの期間、最低限必要な収納缶本数のみを貯蔵するためのラックが配置された。
デブリ回収側では、5本の収納缶を装荷できる回転式のカルーセルをSWPから吊り降ろし、これらが満杯になるまでデブリ取り出しを継続できる仕様となった。移送キャスクの遮蔽体は可動式で、収納缶を吊り上げる際には、SWP位置まで円筒状に下がって作業員を防護する方式であった。また、デブリ取り出しの進捗に伴って、収納缶の固定位置が下がるように設計された。収納缶の位置が下がることで、より長いデブリも収納可能になる(上部スペースが広くなる)。
SWPの回転時に、デブリ収納缶が、他のツールなどとたびたび衝突したと記載されている[20]。また、上部端栓のいくつかはゆがんだり固着していて、収納缶に回収できなかった。
燃料・デブリの移送と貯蔵、構外輸送
デブリ移送システム
建屋に本来取り付けられていた燃料移送システムでは燃料集合体を移送するが、デブリ収納缶+移送・遮蔽キャスクの重量はこれより大きくて重い(#設計上の収納缶重量は最大1.27トン)。 収納缶の重量対応と吊り上げウィンチの信頼性が課題とされ、ウィンチ設計が更新された。一部備品・ツールは、TMI-2の備品を除染して、製造業者で改良して利用されることになった。
本来の燃料移送クレーンは、収納缶移送トロリーに置き換えられた。収納缶をカルーセルから吊り上げる際には、円環状の遮蔽カラーを吊り下げ、その内側でグラップルツールを吊り降ろし収納缶を吊り上げる方式だった。Canal最深部に移送してから、冷却水中にカラーごと吊り降ろし、水中移送システムで貯蔵ラックに収納する。
ポーラークレーンのかわりに、収納缶移送用のサービスクレーンが設置された。これにより、燃料移送Canalの範囲であれば収納缶を移動可能となった。サービスクレーンは長尺ツールのサポートにも使用された。
貯蔵ラック
デブリの構外輸送スケジュールが、デブリ取り出し作業に影響しないように配慮された。 そこで、250体の収納缶が燃料取り扱い建屋のプール内に、11体が原子炉建屋のCanal最深部に貯蔵できるように設計された。Canal最深部の貯蔵ラックには、DWCS系の前段として、Filterタイプの収納缶が配置された。 また、燃料取り扱い建屋側とのバッファーの役割が与えられた。燃料プール側では、中性子毒物を高濃度でとりつけなくても、250本の収納缶を配置できる距離がとられた。 燃料プール側のラックは、開放格子型のモジュラータイプ(9x7格子モジュール4基、45cmピッチ)であった。ラックは自立型で、燃料プールの設計変更が不要なように配慮された。Canal最深部側のラックは、11個の保管位置(45cmピッチ)を有する構造であった。Canal最深部側のラックの内8個はDWCS系前段に配置されたFilterタイプ収納缶であった。
火災発生時の、デブリ自然発火性、放射線による水素と酸素の発生、水蒸気発生にかかわる安全対策として、以下が提示された[20]。
- 水素再結合触媒を全収納缶内に装荷
- 移送前に、全収納缶内を乾燥・脱水処理
- デブリ収納前後で、収納缶ごとにデブリと付着水の重量とカバーガスの容積を測定
- Arか窒素で封入
- 移送直前に、収納缶重量と内圧を測定
- 長期貯蔵前に収納缶ベント
- 燃料デブリ取り出し中に、実デブリサンプルで自然発火性確認試験を継続実施
- 構外輸送キャスクは、仮想的な火事が発生した条件でも、内部の温度が120℃以下になるように設計
構外輸送キャスク
構外輸送キャスクは、規定10-CFR-71.63により、Pu輸送可能な容器であること、および、キャスクと内側容器は、規定ANSI-N-14.5により、リークタイトであること(リーク速度<10-7cc/s)、乾式で移動できること(水没させずに)、とされた。さらに、特別なNRCライセンスにおいて、金属疲労、応力(製造時、輸送時の振動、仮想的な事故時の落下)、設計仕様(2重容器、リークタイト)が規定された[21]。キャスク落下試験(1/4モデル)により、破損解析モデルが検証された。
構外輸送は、中間貯蔵サイトであるINELに向けて鉄道輸送されることとなった。トラック輸送より、安価で、取り扱い時の自由度が高いと評価された。キャスク1体当たり装荷するのに4日かかり、移送前後で50日くらい仮に保管されることなどから、250体の収納缶輸送にのべ33か月かかるとされた。
参考文献
[1] D.E. Scardena, TMI-2 Technical Information and Examination Program 1983 Annual Report, GEND-039, 1984.
[2] C.J. Hess, TMI-2 Technical Information and Examination Program 1984 Annual Report, GEND-049, 1985.
[3] G.R. Brown, U.S. DOE Three Mile Island Research and Development Program 1985 Annual Report, GEND-055, 1986.
[4] EG&G Idaho Inc., U.S. DOE Three Mile Island Research and Development Program 1986 Annual Report, GEND-060, 1987.
[5] D.W. Croucher, Three Mile Island Unit 2 Core status Summary: A Basis for tool Development for Reactor Disassembly and defueling, GEND-007, 1981.
[6] P.R. Bengel, M.D. Smith, G.A. Estabrook, TMI-2 Reactor Vessel Head Removal, GEND-044, 1985.
[7] D.C. Wilson, TMI-2 Reactor Vessel Plenum Final Lift, GEND-054, 1986.
[8] Bechtel Northern Corporation, Quick Look Inspection: Report on the Insertion of a Camera into the TMI-2 Reactor Vessel through a Leadscrew Opening, vol. 1, GEND-030, 1983.
[9] TMI-2 Defueling Tools Engineering Report, GEND-INF-073, 1986.
[10] V.F. Baston, W.E. Austin, K.J. Hoffstetter, D.E. Owen, TMI-2 Pyrophoricity Studies, GEND-043, 1984.
[11] M.W. Ales, J.D. Connell, R.V. DeMars, D.A. Nitti, Equipment for Removal of the TMI-2 Plenum Assembly, GEND-INF-051, 1984.
[12] R.V. DeMars, S.K. Brown, TMI-2 Plenum Assembly Removal Equipment Design, Proceedings of the 1986 Joint ASME/ANS Nuclear Power Conference, July 20 -23, Philadelphia, PA, 1986.
[13] R.W. Garner, D.E. Owen, M.R. Martin, An Assessment of the TMI-2 Axial Power-Shaping-Rod Dynamic Test Results, GEND-INF-038, 1983.
[14] J.O. Henrie, Proposed methods for Defueling the TMI-2 Reactor core, GEND-INF-027, 1984.
[15] D.E. Falk, C.E. Swenson, TMI-2 Defueling System Design Description, GEND-INF-065, 1985.
[16] G.R. SKillman, TMI2号機でのデブリ取り出しへの経験、1F廃炉への教訓、2023年8月28日、NDF第7回福島第一廃炉国際フォーラム
[17] S.M. Jensen, D.W. Akers, R.W. Garner, G.S. Roybal, Examination of the TMI-2 Core Distinct Components, GEND-INF-082, 1987.
[18] H.M. Burton, R.L. Freemerman, Reactor Disassembly Activities at Three Mile Island Unit Two, Progress in Nucl. Energy, 17 (1986) 141-174.
[19] G.L. Calhoun, Fuel Removal Equipment for Three Mile Island Unit 2, Nucl. Technol. 87 (1989) 587-594.
[20] J.N. Appel, J.O. Henrie, Evaluation of Special Safety Issues Associated with Handling the TMI-2 Core Debris, Rockwell Hanford Operations Report, SD-WM-TA-009, 1984.
[21] Nuclear Packaging, Inc., Shipping Casks to Transport Three Mile Island (TMI) Core, Technical Proposal P3950R2, 1984.