'''1984年5月の技術レビュー'''により、デブリ取り出し工法が決定された[1]。'''図1'''に、選定された工法の概念図を示す[2]。作業員の被ばく抑制、汚染水発生量や汚染範囲の抑制、作業信頼性やメンテナンス性、将来の作業自由度の確保などが重視され、作業員が長尺ツールをマニュアル操作する工法が選定された('''Pick-and-Place工法''')。ロボットによる完全遠隔工法は採用されないこととなった。これにより、圧力容器上部の燃料移送Canalの空間は、通常の燃料交換と異なり、注水されずに大気条件に置かれることとなった('''Dry工法''')。燃料デブリ取り出しの準備作業として、圧力容器ヘッドを撤去した後に、通常の燃料交換で使用する'''IIF(Internal Indexing Fixtgure)'''をリークタイトに改良したものを設置し、作業空間の遮蔽と、デブリを水中で収納缶内に回収する作業を行うスペースを確保するために、圧力容器内の水位が約1.5m上昇できるようにされた。次に、上部プレナム構造物が撤去された後で、改良IIFの上に、'''遮蔽付きの回転式作業プラットフォーム(SWP: Shielded Working Platform)'''が設置された。SWPに設けられたスロットから、長尺ツールが挿入できるように設計された。また、SWPには、収納缶の位置決めシステム('''Canister Positioning System''')や、オフガス系や冷却水の循環処理システム('''DWCS: Defueling Water Cleanup System''')とのコネクションが取り付けられた。水中でデブリを格納した収納缶は、SWP上で洗浄され、遮蔽ベルで覆って、大気中を、Canal最深部まで移送される設計となった。収納缶移送装置('''Canister Transfer Device''')は、既設の燃料集合体移送装置をリプレースして設置された。Canal最深部は水没され、さらに、収納缶と上部プレナム構造物を貯蔵できるように、Canal浅瀬部との間に鋼鉄製のダムが設置された。Canal最深部で、いったん貯蔵ラックに装荷された収納缶は、燃料移送装置('''Fuel Transfer Mechanism''')により横倒しにされ、燃料移送Canal('''Transfer Canal''')を通じて、隣接する燃料取り扱い建屋内の使用済み燃料プールに移送された。'''図2'''に、圧力容器上部のSWP周辺の概念図を示す[3]。SWPは、改良IIFとは別の構造物で支持され、その上に、長尺ツール等を吊り下げられる'''ジブクレーン'''が設置された。これにより、作業員は長尺ツール自体の重さを支持することなく、作業を行うことができる。
<span style="color:blue">'''1984年5月の技術レビュー'''</span>により、デブリ取り出し工法が決定された[1]。'''図1'''に、選定された工法の概念図を示す[2]。作業員の被ばく抑制、汚染水発生量や汚染範囲の抑制、作業信頼性やメンテナンス性、将来の作業自由度の確保などが重視され、作業員が長尺ツールをマニュアル操作する工法が選定された(<span style="color:blue">'''Pick-and-Place工法'''</span>)。ロボットによる完全遠隔工法は採用されないこととなった。これにより、圧力容器上部の燃料移送Canalの空間は、通常の燃料交換と異なり、注水されずに大気条件に置かれることとなった(<span style="color:blue">'''Dry工法'''</span>)。燃料デブリ取り出しの準備作業として、圧力容器ヘッドを撤去した後に、通常の燃料交換で使用する<span style="color:blue">'''IIF(Internal Indexing Fixtgure)'''</span>をリークタイトに改良したものを設置し、作業空間の遮蔽と、デブリを水中で収納缶内に回収する作業を行うスペースを確保するために、圧力容器内の水位が約1.5m上昇できるようにされた。次に、上部プレナム構造物が撤去された後で、改良IIFの上に、<span style="color:blue">'''遮蔽付きの回転式作業プラットフォーム(SWP: Shielded Working Platform)'''</span>が設置された。SWPに設けられたスロットから、長尺ツールが挿入できるように設計された。また、SWPには、収納缶の位置決めシステム(<span style="color:blue">'''Canister Positioning System'''</span>)や、オフガス系や冷却水の循環処理システム(<span style="color:blue">'''DWCS: Defueling Water Cleanup System'''</span>)とのコネクションが取り付けられた。水中でデブリを格納した収納缶は、SWP上で洗浄され、遮蔽ベルで覆って、大気中を、<span style="color:blue">'''Canal最深部'''</span>まで移送される設計となった。収納缶移送装置(<span style="color:blue">'''Canister Transfer Device'''</span>)は、既設の燃料集合体移送装置をリプレースして設置された。Canal最深部は水没され、さらに、収納缶と上部プレナム構造物を貯蔵できるように、Canal浅瀬部との間に鋼鉄製のダムが設置された。Canal最深部で、いったん貯蔵ラックに装荷された収納缶は、燃料移送装置(<span style="color:blue">'''Fuel Transfer Mechanism'''</span>)により横倒しにされ、燃料移送Canal(<span style="color:blue">'''Transfer Canal'''</span>)を通じて、隣接する燃料取り扱い建屋内の使用済み燃料プールに移送された。'''図2'''に、圧力容器上部のSWP周辺の概念図を示す[3]。SWPは、改良IIFとは別の構造物で支持され、その上に、長尺ツール等を吊り下げられる'''ジブクレーン'''が設置された。これにより、作業員は長尺ツール自体の重さを支持することなく、作業を行うことができる。
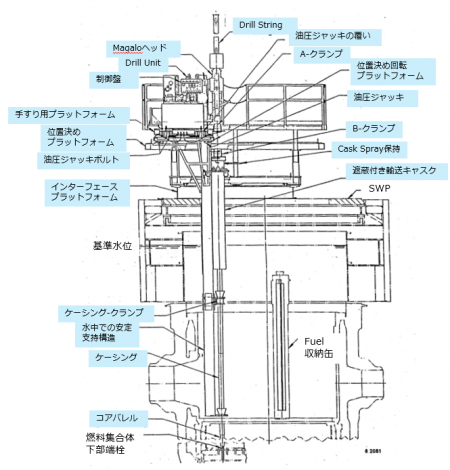
1984年5月の技術レビューにより、デブリ取り出し工法が決定された[1]。図1に、選定された工法の概念図を示す[2]。作業員の被ばく抑制、汚染水発生量や汚染範囲の抑制、作業信頼性やメンテナンス性、将来の作業自由度の確保などが重視され、作業員が長尺ツールをマニュアル操作する工法が選定された(Pick-and-Place工法)。ロボットによる完全遠隔工法は採用されないこととなった。これにより、圧力容器上部の燃料移送Canalの空間は、通常の燃料交換と異なり、注水されずに大気条件に置かれることとなった(Dry工法)。燃料デブリ取り出しの準備作業として、圧力容器ヘッドを撤去した後に、通常の燃料交換で使用するIIF(Internal Indexing Fixtgure)をリークタイトに改良したものを設置し、作業空間の遮蔽と、デブリを水中で収納缶内に回収する作業を行うスペースを確保するために、圧力容器内の水位が約1.5m上昇できるようにされた。次に、上部プレナム構造物が撤去された後で、改良IIFの上に、遮蔽付きの回転式作業プラットフォーム(SWP: Shielded Working Platform)が設置された。SWPに設けられたスロットから、長尺ツールが挿入できるように設計された。また、SWPには、収納缶の位置決めシステム(Canister Positioning System)や、オフガス系や冷却水の循環処理システム(DWCS: Defueling Water Cleanup System)とのコネクションが取り付けられた。水中でデブリを格納した収納缶は、SWP上で洗浄され、遮蔽ベルで覆って、大気中を、Canal最深部まで移送される設計となった。収納缶移送装置(Canister Transfer Device)は、既設の燃料集合体移送装置をリプレースして設置された。Canal最深部は水没され、さらに、収納缶と上部プレナム構造物を貯蔵できるように、Canal浅瀬部との間に鋼鉄製のダムが設置された。Canal最深部で、いったん貯蔵ラックに装荷された収納缶は、燃料移送装置(Fuel Transfer Mechanism)により横倒しにされ、燃料移送Canal(Transfer Canal)を通じて、隣接する燃料取り扱い建屋内の使用済み燃料プールに移送された。図2に、圧力容器上部のSWP周辺の概念図を示す[3]。SWPは、改良IIFとは別の構造物で支持され、その上に、長尺ツール等を吊り下げられるジブクレーンが設置された。これにより、作業員は長尺ツール自体の重さを支持することなく、作業を行うことができる。
[6] P.L. Winston, Management of the Three Mile Island Unit 2 Accident Corium and Severely Damaged Fuel Debris, Contribution to International Atomic Energy Agency Coordinated Research Proposal T13015, INL-EXT-21-61607, rev. 2, 2022.
[11] M.S. McGough et al., Performance of the Automated Cutting Equipment System During the Plasma Cutting of the Three Mile Island Unit 2 Lower Core Support Assembly, Nucl. Technol., 87 (1989) 648-659.
[2] A.W. Marley, D.W. Akers and C.V. Mclsaac, Sampling and Examination Methods Used for Three Mile Island Unit 2, Nucl. Technol. 87 (1989) 845-856.